plc.mechatronika.hu
www.microchip.com
Idézetek
"A harcosoké a dicsőség, de a mérnökök építik a társadalmat."
B.L.T
"Nem a rendkívüli éleslátás teszi naggyá az államférfit, hanem a jelleme."
Voltaire
"A kérdés, ami néha elbizonytalanít: én vagyok őrült, vagy mindenki más?"
Einstein
"Nem vagyok én olyan okos, csak többet foglalkozom a problémákkal."
Einstein
Nem érti ezt az a sok ember,
Mi áradt itt meg, mint a tenger?
Miért remegtek világrendek?
Egy nép kiáltott. Aztán csend lett.
De most sokan kérdik: mi történt?
Ki tett itt csontból, húsból törvényt?
És kérdik, egyre többen kérdik,
Hebegve, mert végképp nem értik -
Ők, akik örökségbe kapták -:
Ilyen nagy dolog a Szabadság?
Márai Sándor
F-1 robot:
Készítette: Kerényi Pál
Project név: F1
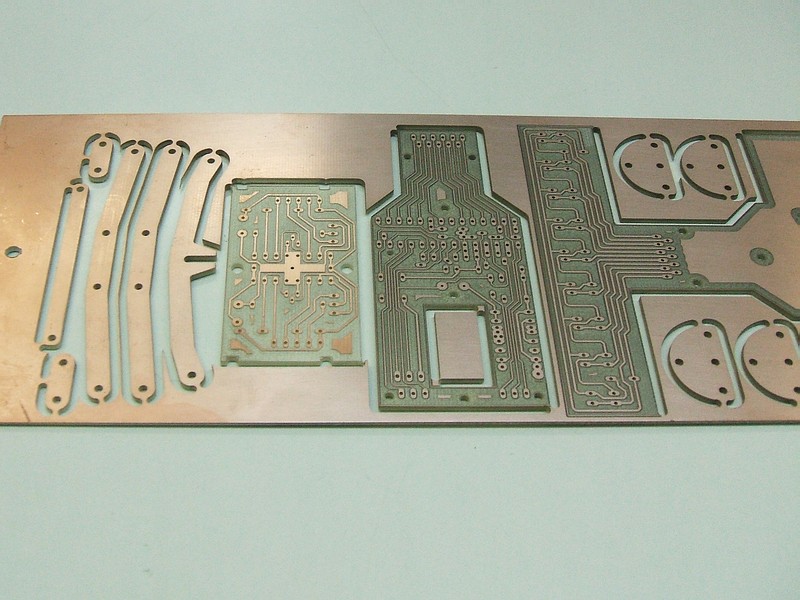
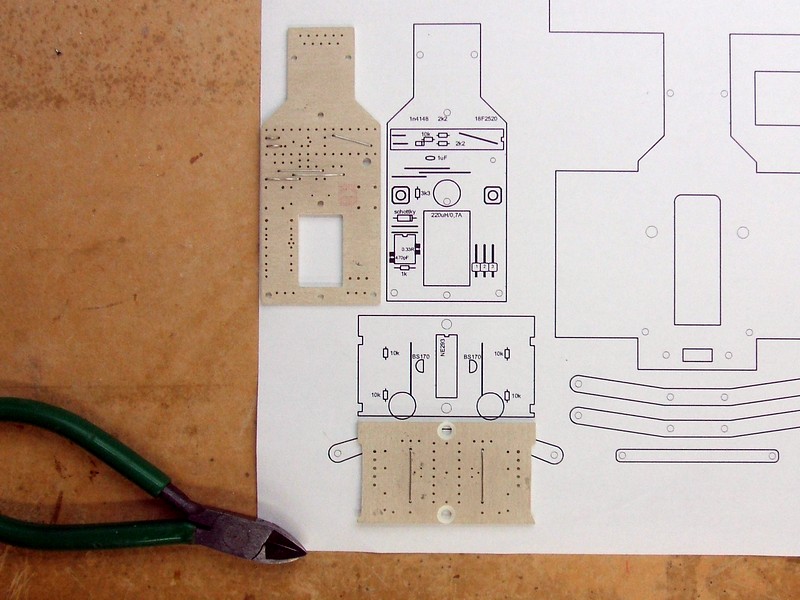
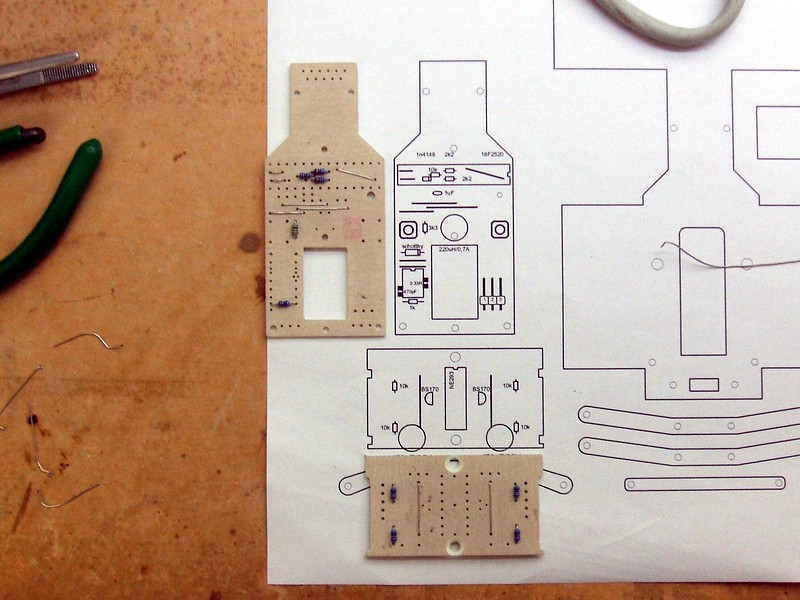
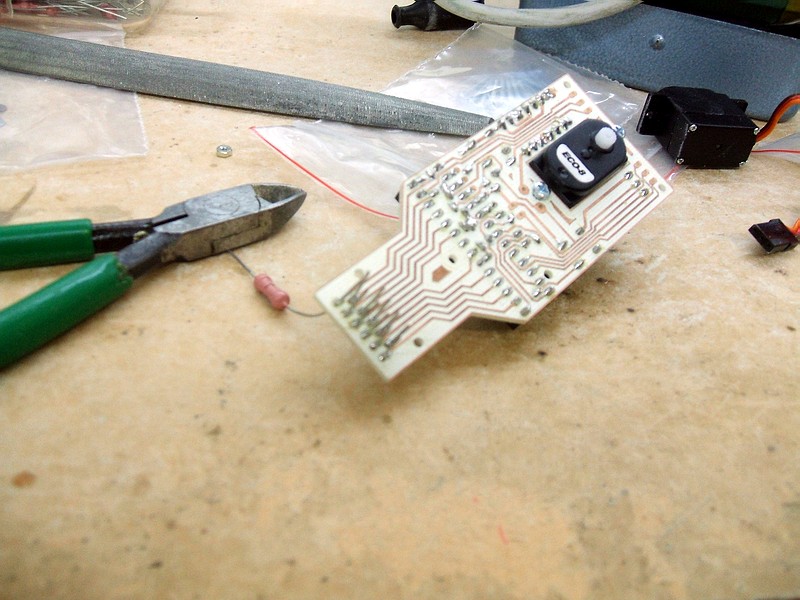
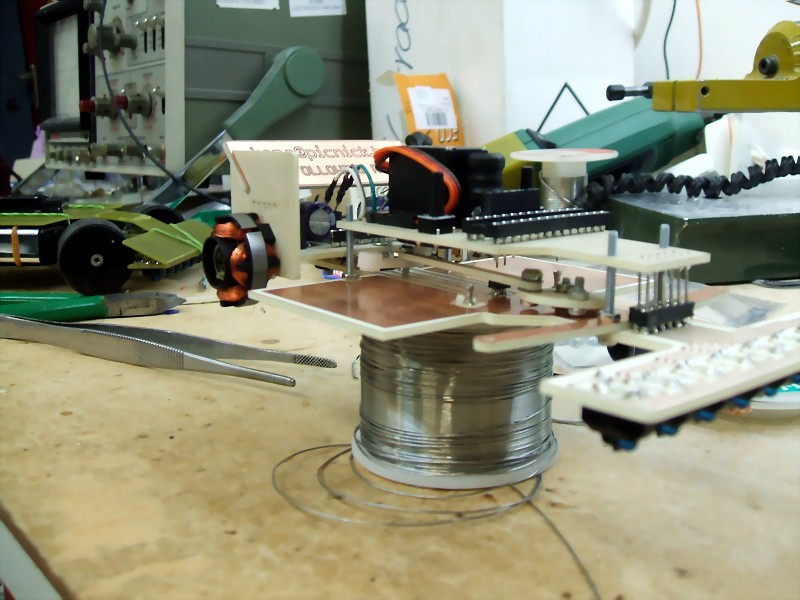
Az első példány foto eljárással készült és kézzel, lemezollóval, fúróval, reszelővel, faragtam ki a NYÁK-ból. Az építés emiatt nagyon sok időbe és fáradtságba került. A képek a második és harmadik robot építéséről készültek amelyek alkatrészeit NYÁK-maró CNC faragta ki.
Képek: (építési képek...)



Videók:


Építési (koppintási) segédlet:
![]() alkatrész lista,
alkatrész lista,
![]() kapcsolási rajz,
kapcsolási rajz,
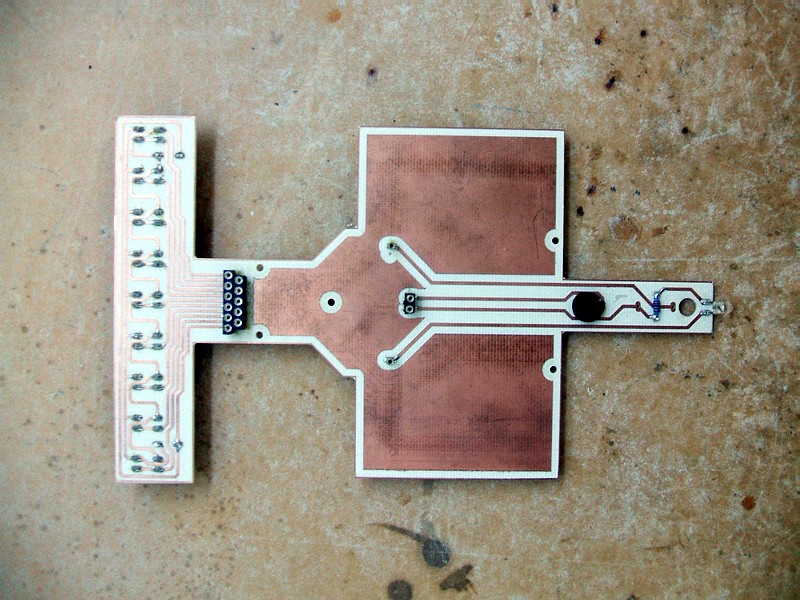
![]() NYÁK-terv,
NYÁK-terv,
![]() beültetési rajz,
beültetési rajz,
![]() orrkerék
orrkerék
![]() TS34063,
TS34063,
![]() 18F2520,
18F2520,
![]() L293DNE,
L293DNE,
![]() TCRT5000,
TCRT5000, ![]() gyakorló pálya
gyakorló pálya
Programozási segédlet:
![]() Amit tudni kell,
Amit tudni kell, ![]() F1_0.ASM,
F1_0.ASM, ![]() F1_MINTA.HEX
F1_MINTA.HEX
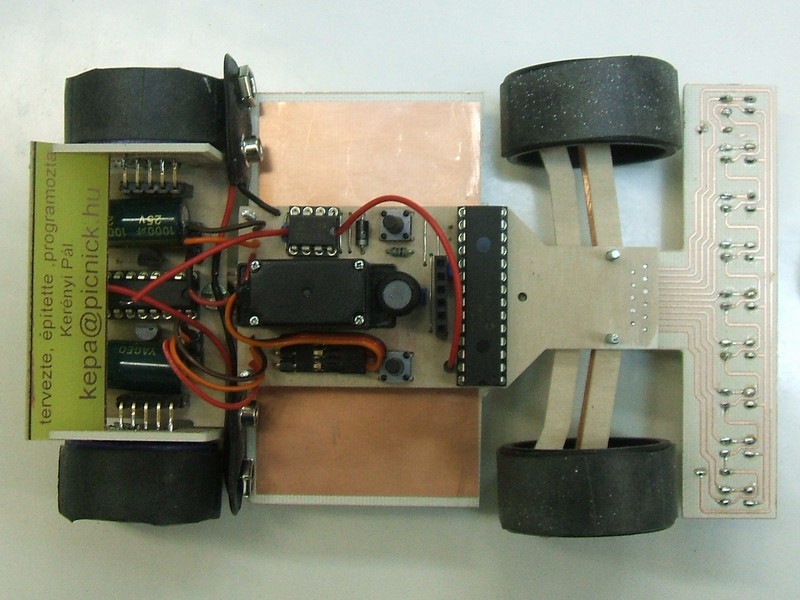
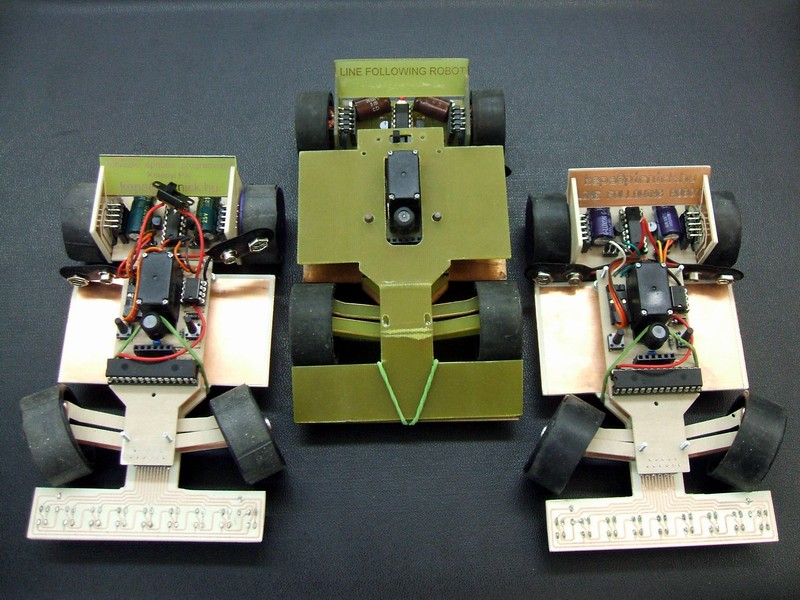
Az ötletet a 2008-as Harmadik Magyar Alkalmazott Mérnöki Tudományok Versenye adta. Az F-1 robot sebessége a verseny-nyertes IBAG nevű robotomnál ugyan lassabb, de legalább Forma-1 alakja van. :) Ez a robot is több generáción ment át mire elkészült a jelenlegi, a honlapon is látható verzió.
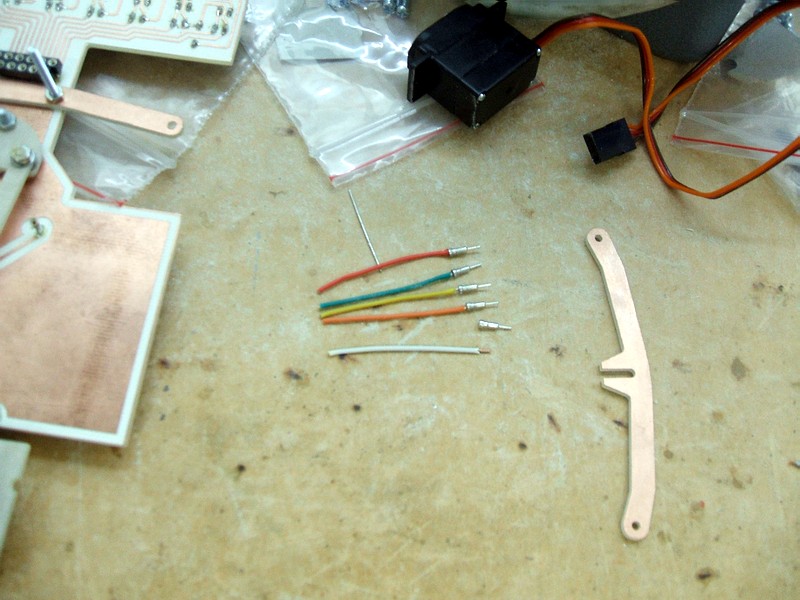
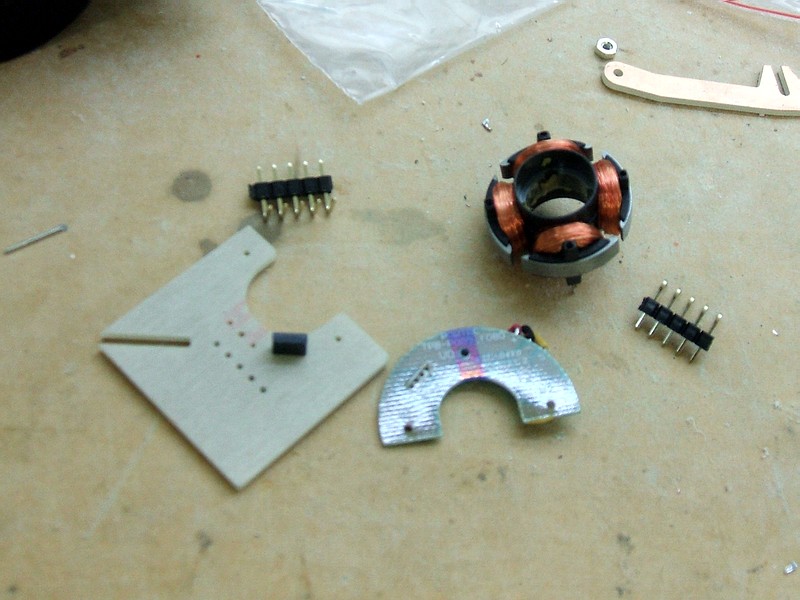
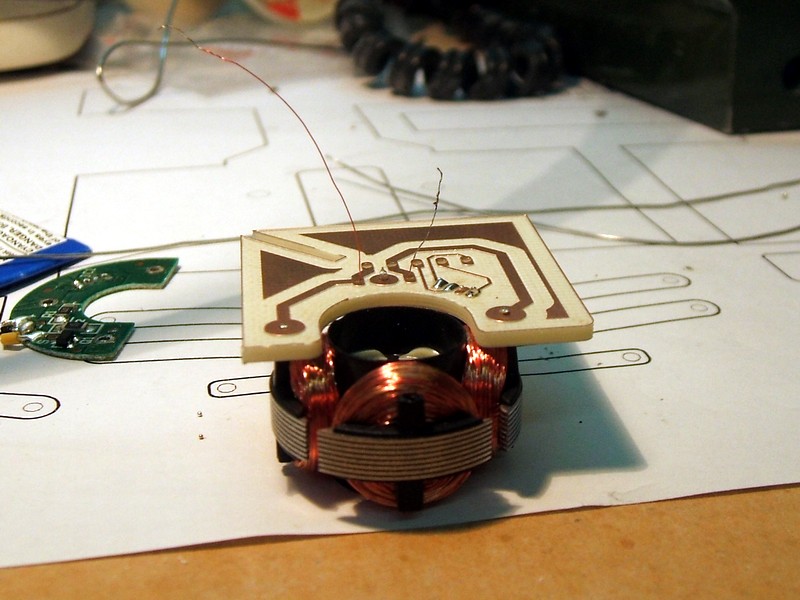
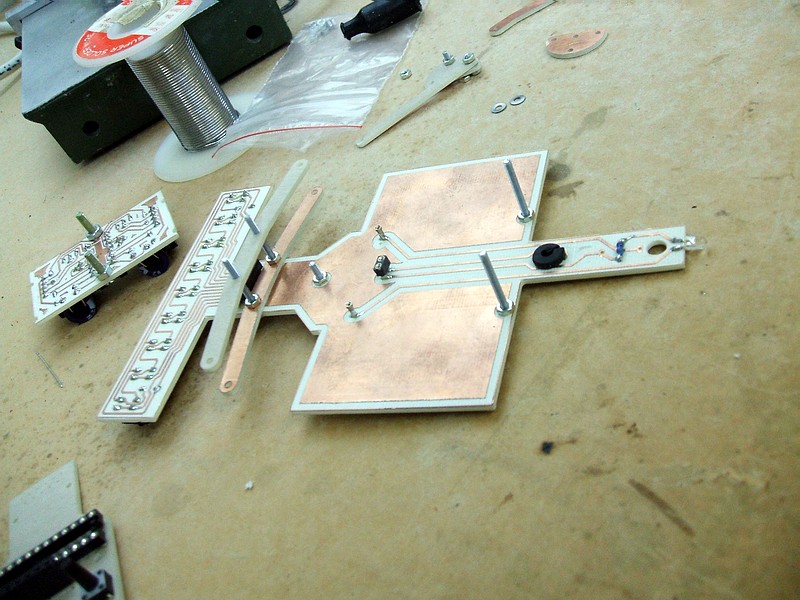
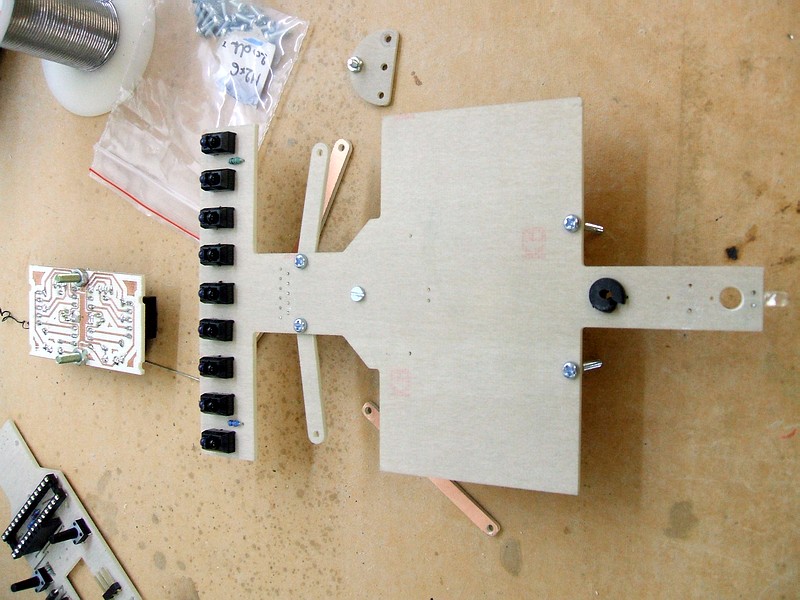
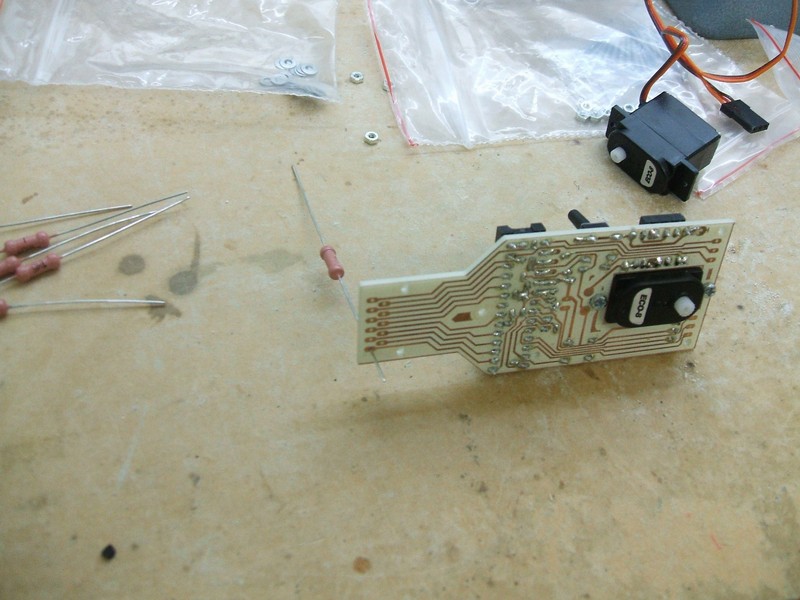
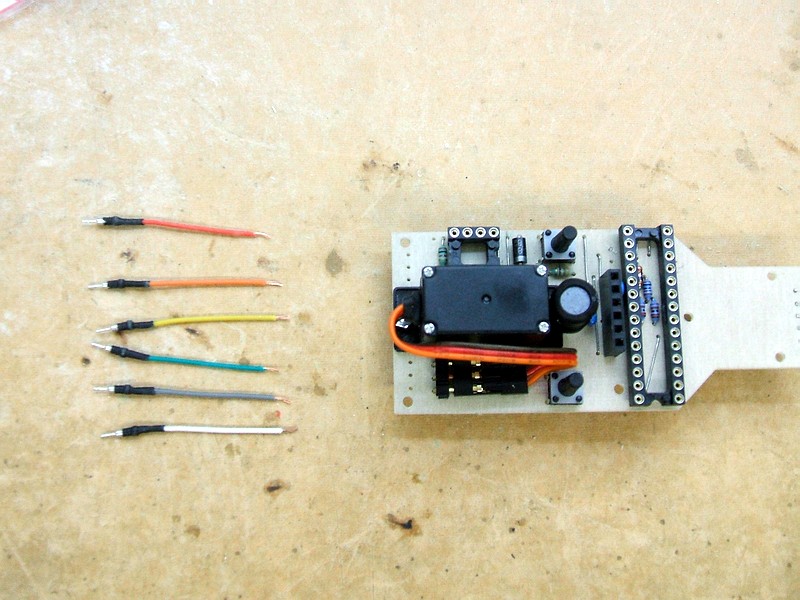
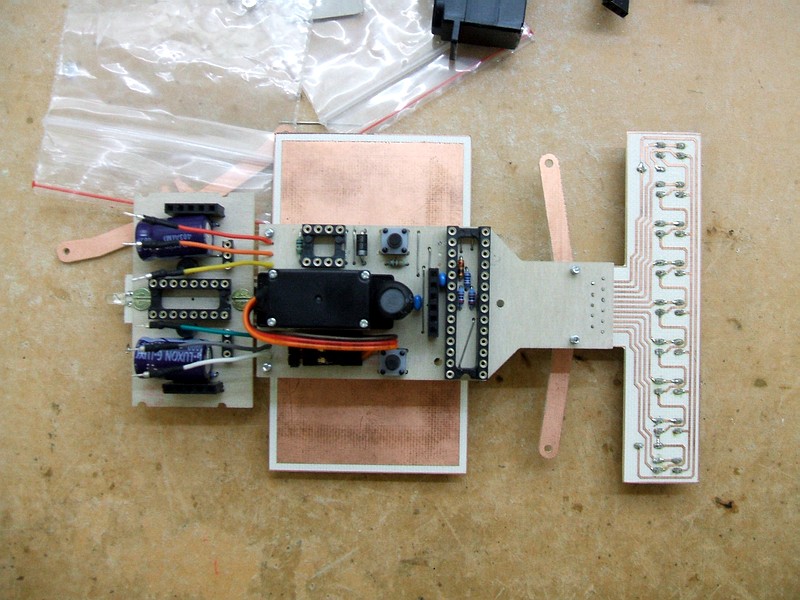
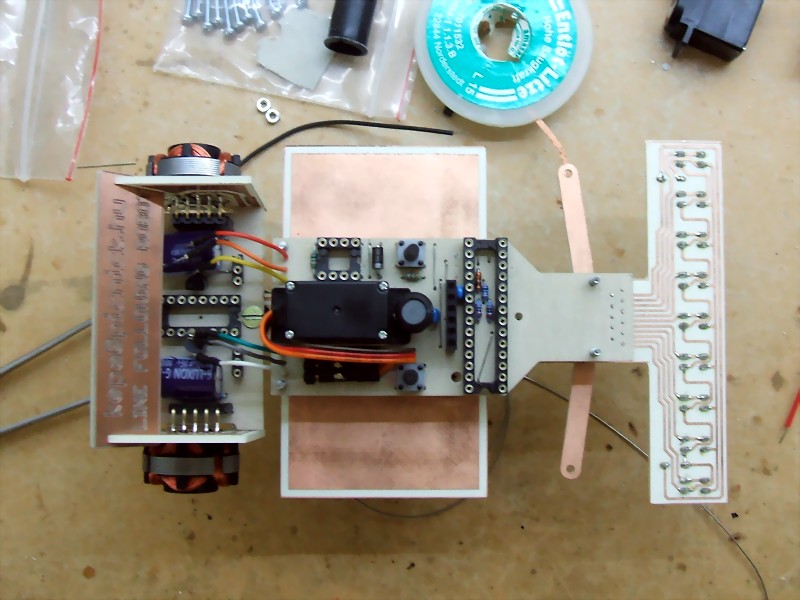
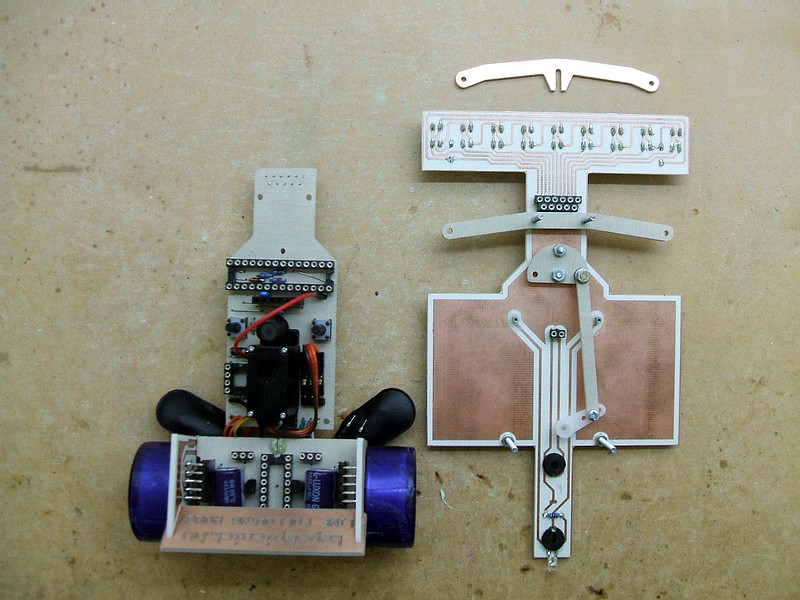
A robot energiaforrása két 9V-os elem vagy akkumulátor. A meghajtásért felelős "motor" két db. 12V-os 8x8 cm-es hűtőventillátor, a kormányzásért egy mikro szervo felel. És hogy a vezérlő tudja merre kell kormányozni, a robot orrában 9 db. TCRT5000 típusú reflektív optocsatoló van.
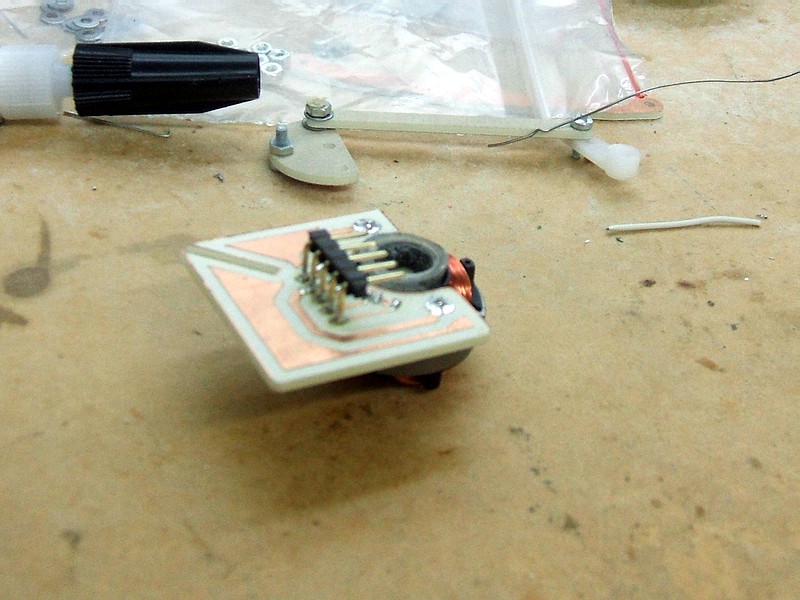
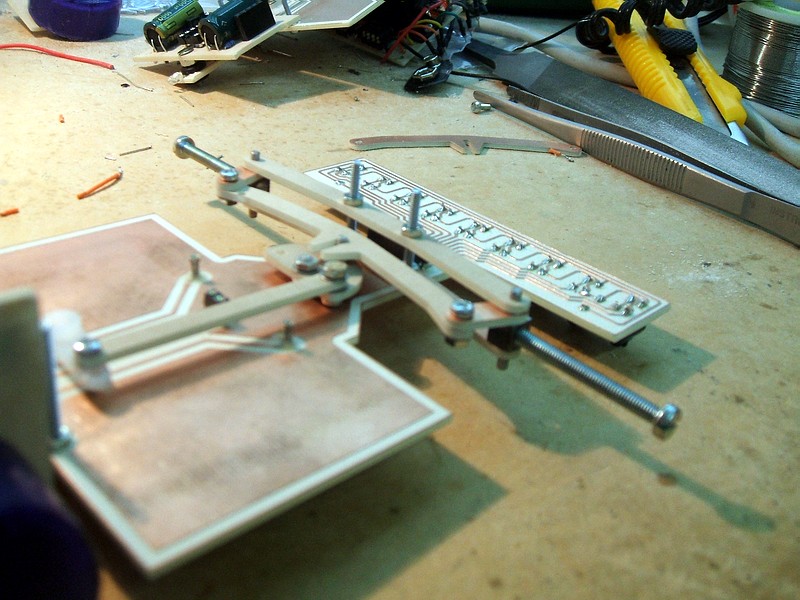
A karosszéria és szinte minden alkatrész NYÁK-lapból készült mivel megfelelő szilárdágú és jól alakítható :) a felső burkolat és az alváz szendvicsként fogja össze a robotot az energiaforrásokkal együtt. Mivel a kereskedelemben nem kapható elegendő hosszúságú M2-es csavar ezért egy bicikliküllő tartja össze a robotot, amelyből a négy darab összetartó menetes rúd készült.
A kormányzás a "nagyoknál" használt kormánytrapéz rendszerrel azonosan működik, tehát a belső íven lévő kerék nagyobb szögben fordul mint a külső. A nyomtávkar, és a nyomtávrudak szintén NYÁK-ból készültek
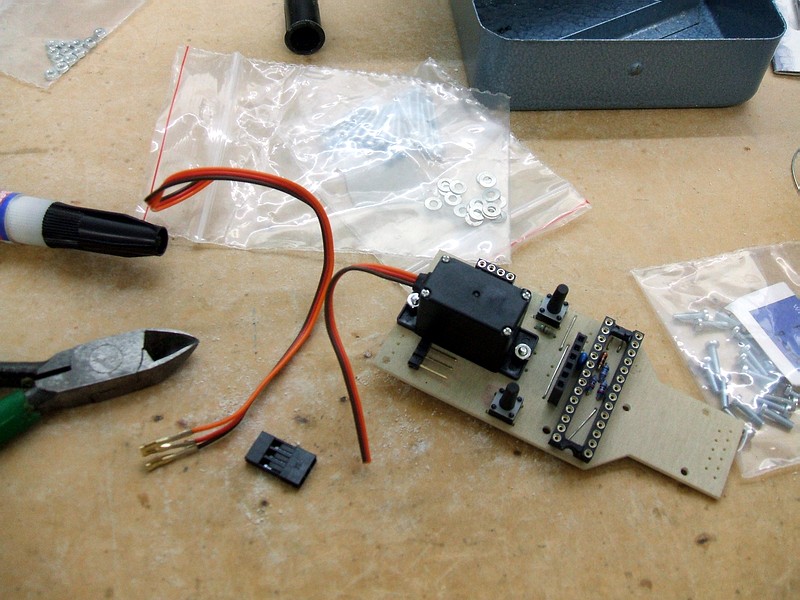
A robot agya egy PIC18F2520-as amely, a két energiaforrás között a szervo előtt kapott helyet. Természetesen bármilyen másik lábkompatibilis vezérlővel is működtethető a robot.
Később a robot, kapcsoló üzemű tápegységet is kapott a soros áteresztő L7805 helyett, ezzel hosszabb üzemidőt biztosítva a robot számára.
A nyomaték növelésére a motorok újratekercselése helyett más megoldást kellett találnom. Az eddig fél periódusban lustálkodó tekercseket is munkára fogtam. Ezzel megnövelve a motorok által leadott nyomatékot és ezzel együtt a fogyasztást is, de mivel F-1-es robotot építünk, a fogyasztás nem számít!
Természetesen folyamatos üzem mellett a motorok túlmelegednének, mivel nem erre vannak kitalálva, de mire jó a PWM? (periódus szélesség moduláció) Csak akkor használjuk a teljes nyomatékot, amikor szükség van rá. Különben pedig csak 'szinkronban' tartjuk a motort. A robot sajnos még így sem képes mindíg elindulni önerejéből, de ha már megy láthatóan jobban gyorsul és fékez. Hiába ez nem soros DC motor...
A robot elkészítésében nyújtott önzetlen segítségükért köszönet:
Juhász Róbertnek (Mechatronika)
Lehotzky Tibornak (Mechatronika)
Nagymáthé Tamásnak (Mechatronika)
Gyukli Zoltánnak (Mechatronika)
Wendler Márknak (Mechatronika)
És Sípos Attilának aki bogarat ültetett a fülembe és emiatt a robottal foglalkoztam hosszú hónapokat, ahelyett, hogy valami értelmeset csináltam volna :)