plc.mechatronika.hu
www.microchip.com
Idézetek
"Nem a rendkívüli éleslátás teszi naggyá az államférfit, hanem a jelleme."
Voltaire
"A kérdés, ami néha elbizonytalanít: én vagyok őrült, vagy mindenki más?"
Einstein
"Nem vagyok én olyan okos, csak többet foglalkozom a problémákkal."
Einstein
Nem érti ezt az a sok ember,
Mi áradt itt meg, mint a tenger?
Miért remegtek világrendek?
Egy nép kiáltott. Aztán csend lett.
De most sokan kérdik: mi történt?
Ki tett itt csontból, húsból törvényt?
És kérdik, egyre többen kérdik,
Hebegve, mert végképp nem értik -
Ők, akik örökségbe kapták -:
Ilyen nagy dolog a Szabadság?
Márai Sándor
Vonalkövető robot:
Készítette: Kerényi Pál
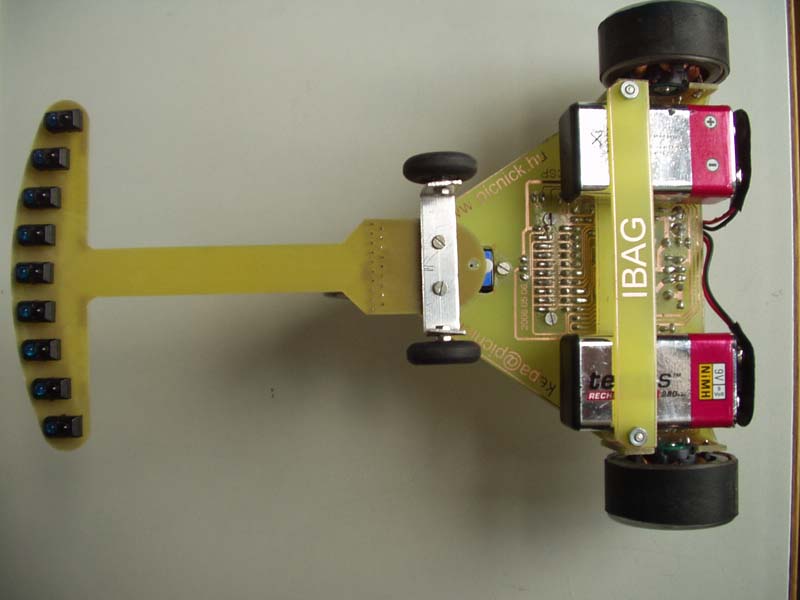
Project név: IBAG
A kezdet:

IBAG:





Videók:


Már rég óta foglalkoztatott a vonalkövető robot építés, egész pontosan mióta egy régi barátom Balogh Richárd aki mellesleg egy ismert reklámcég produkciós igazgatója megkérdezte, hogy "Tudnék e ilyet csinálni?" Az egyik ügyfélnek kellett volna promóciós célra.
Én válaszoltam neki, hogy igen, mi sem egyszerűbb és mondtam neki fél év fejlesztési időt, hisz akkor kezdte szívni a véremet a felsőoktatás. Természetesen nem lett belőle semmi mivel 'tegnapra' kellett volna, de hát a reklámszakma már csak ilyen.
Akkor már 5-6 éve foglalkoztam a PIC mikrovezérlőkkel a 16-os sorozattal tanultam meg a csíziót, a huzalozott architektúra előnyét és az assembly szépségét, amit Juhász Róbert akkori tanárom, és a mai napig jó barátom mutatott meg nekem.
Aztán mikor egy nagyobb assembly programmal nem fértem el a 16F877-es anno hatalmasnak és teleírhatatlannak vélt memóriájában, akkor jött a 18-as sorozat majd mikor nem volt képem egy egyszerű feladatra 'elpazarolni' egy 16-ost vagy 18-ast akkor megismerkedtem a 12-es sorozattal. Mondhatom nem volt hosszú ismerkedés, hisz a dokumentációja sem az, tudása is igen szerény, de az adott célnak tökéletesen megfelelt.
Ismét elkalandoztam, nem arról beszélek, amiről szólnia kellene a dokumentációnak.
A vonalkövető robot építés kezdetei nálam kb. 2005-re nyúlnak vissza. Az első verzióban 3 optotranzisztor figyelte a vonalat, és piros színű víztiszta LED világította meg a felületet. A hajtást két FET-re bíztam, a szabályozást pedig PWM kitöltéssel oldottam volna meg. Szabadon futó orrkerékkel gondoltam az első kísérleti példányt, ami végül nem készült el, de elég mérési adatom és tapasztalatom gyűlt össze ahhoz, hogy a következő példányt sokkal sikeresebbre építhessem.
Ekkor egy kedves ismerősömtől kaptam egy távirányítós kisautót, aminek a távirányítója a költözés során 'elkopott'. Mondanom sem kell, hogy mennyire örültem, hogy megvan a karosszéria. Aki látott már ilyen távolkelti pár ezer forintos kisautót az tudja, hogy csak annyit tud, hogy épp el lehessen adni.
Ebből a Peugeot 406-os formájú fröccsöntött jószágnak, kezeim alatt csak a műanyag alváza és a burkolata maradt meg, minden más repült.
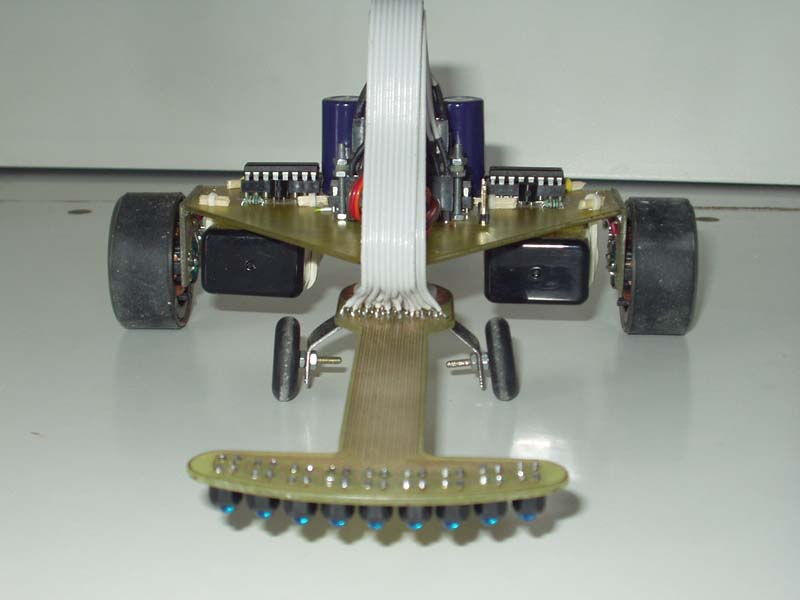
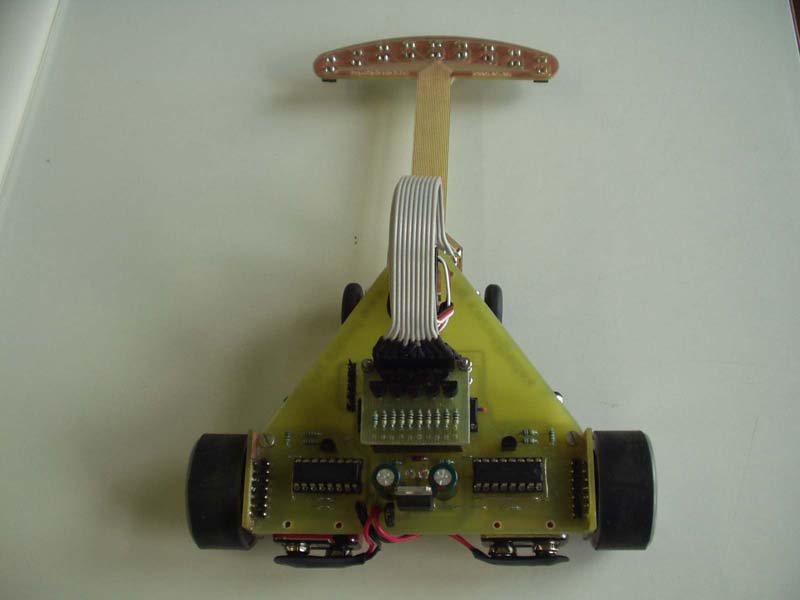
A kocsi orrában a lökhárító mögött kaptak helyet a szenzorok, amik az utat illetve a fekete vagy fehér vonalat figyelték. Mivel a legkisebb forduló ív sugara kb. 80cm-es volt a hátsó két kerék egytengelyes, ill. 'differenciálzáras' hajtásának és az első két kerék csekély kitéríthetőségének köszönhetően, meg kellett oldanom, hogy a pálya elhagyása esetén lefékezzen, megálljon, ellenkormányozzon, és tolasson vissza egy szakaszon majd az ív felé fordulva, folytassa az útját. Amennyiben a vonalat így sem találta meg a kisautó elakadás jelzőjével figyelmeztetett, hogy toljam vissza a vonalra. Természetesen a kanyarok bevételekor a kocsi a megfelelő irányba indexel, a fékezéskor a féklámpa, tolatáskor a tolató lámpa világít. Bekapcsoláskor az orrába szánt "fényszórók" hideg fehér színű LED-ből készültek, amelyek a xeon fényszórók bekapcsolását imitálva fényerő változtatásával időzítve kapcsolnak fel.
A kis Peugeot 406 a mai napig nincs kész, mindig van még valami, amit meg kell csinálni rajta jelen pillanatban a differenciálható, hátsó kerékhajtáson dolgozom, de a Kandó csak nem hagyja.
Keresgéltem a magyar oldalak között, hogy hátha valahol van vonalkövető robot verseny ami külföldön már évtizedes hagyomány. Ekkor találtam meg a www.magyarokamarson.hu verseny kiírását, és a Peugeot 406 project háttérbe szorult.
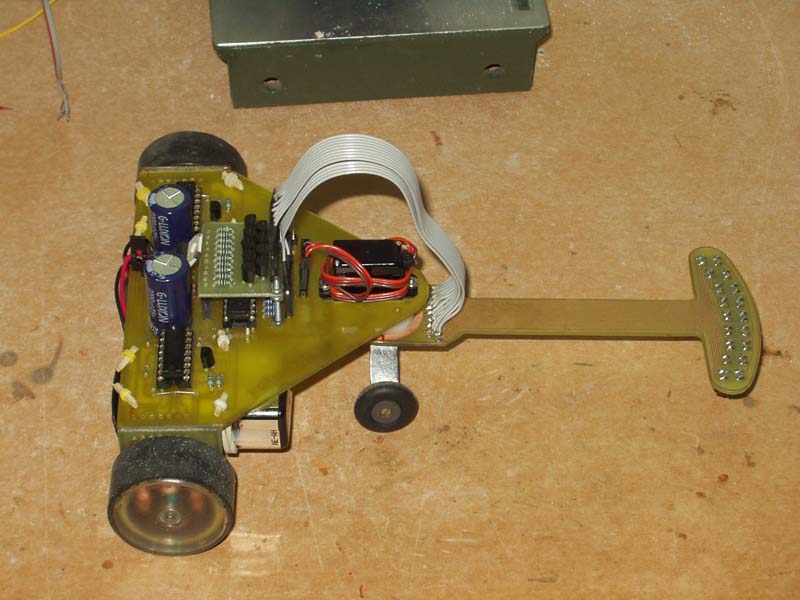
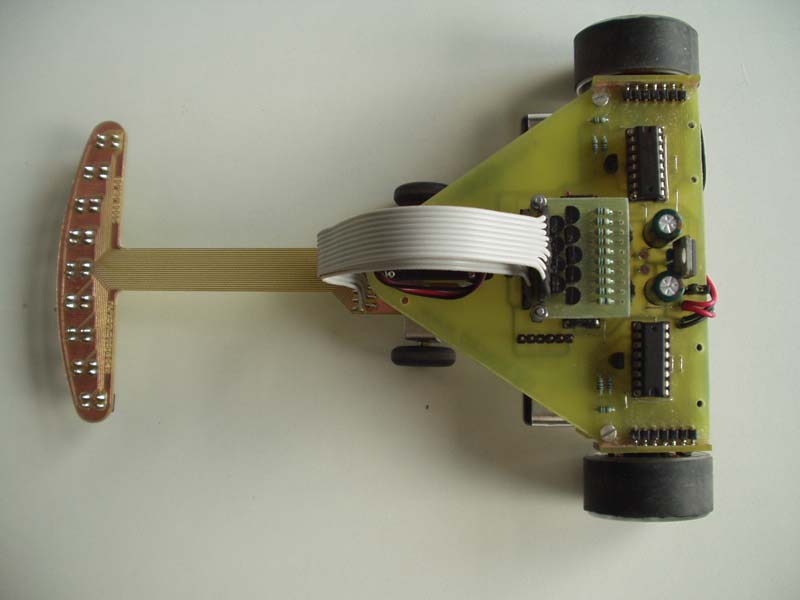
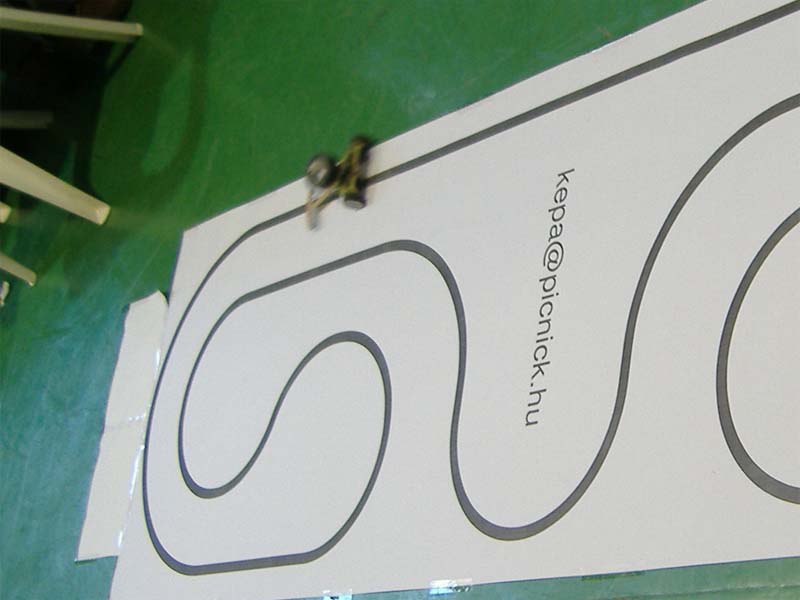
A versenykiírás hosszas tanulmányozása után - 20cm a legkisebb ívsugár, leggyorsabb mért kör számít, használható energiaforrás és meghajtás típusa, stb. - alakult ki a versenyre optimalizált, a lehető legkönnyebb és a 15-ös ívsugárra is képes robot terve.
Az első versenyre szánt robot, ami majdnem ugyanúgy nézett ki, mint a versenyen nyertes robot kicsit szélesebb és hosszabb volt. A verseny előtt pár nappal készült el a végleges verzió, majd a verseny megkezdte után, a végleges program, ami a köridők csökkenéséből jól látható. (A helyszínen faragtam le az első mért köridőmből 30%-ot). Ugyan a végleges program mindössze 200 sorral hosszabb assembly kódból áll, mégis a teljes ott töltött időmet felemésztette. Pedig nagyon érdekelt volna a Rover verseny, de semmit nem láttam belőle, csak néha a tapsot hallottam, amikor valaki vizet talált a kiskunhalasi Marson.
Természetesen a fejlesztésnek nincs vége, ahogy soha sincs. Mindig vannak új ötletek új megoldások, amiket még bele lehet préselni a PIC-tokjába, hisz van még 30ezer sor amibe programot írhatok!
Köszönet:
Juhász Róbertnek, (Mechatronika) plc.mechatronika.hu
Aki rengeteget segített az egész felkészülés alatt ötleteivel, mikrovezérlős tapasztalataival, és kisegített mikor megakadtam. Valamint, hogy az utolsó napig marta fúrta az általam tervezett nyákokat, mikor én már nem láttam a fáradtságtól, csak azért, mert hitt bennem!
Nagymáthé Tamásnak, (Mechatronika)
Aki az iskola nyákmaró CNC-jén kimarta a robot nélkülözhetetlen elemeit és ezzel rengeteg időt spórolt meg nekem az utolsó napokban, amit programozással tölthettem. Valamint hogy érdeklődésével és meglátásaival, tanácsaival segítette munkámat.
Gyukli Zoltánnak, (Mechatronika)
Aki a ventillátorokból gyönyörű hátsókerék 'felniket' varázsolt nekem egy szempillantás alatt, amik a tengelyre nézve tökéletesen centrikusak lettek így 'támaszkodhattam' a hátsó kerekek mindenkori tapadására.
Lehotzky Tibornak, (Mechatronika)
Aki a ventillátormotor csapágy tartó perselyét és az orrfutó felniének esztergálását köszönhetem, és hogy ezzel a lehető legkisebb súrlódási veszteséget tette lehetővé a robotom számára.
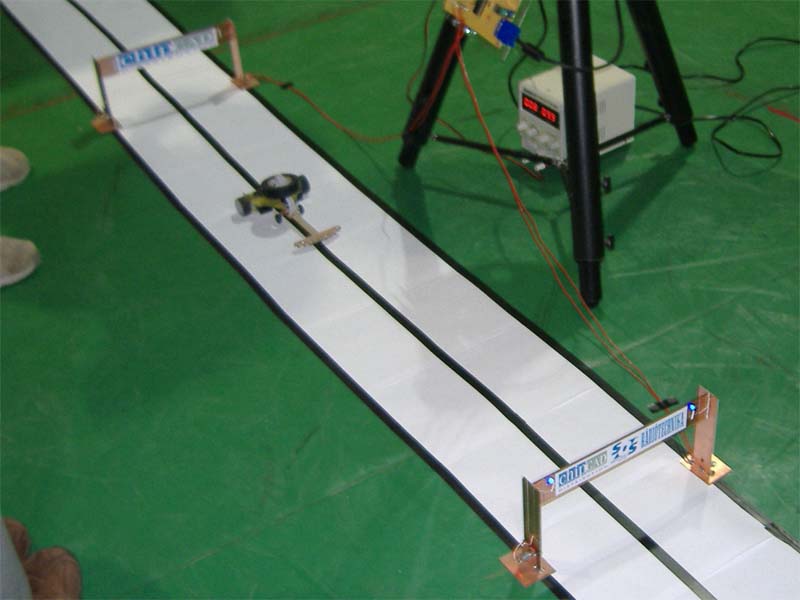
Varga Gábornak, akinek a tesztpálya nyomtatását köszönhetem.
Géczi Gábornak, akitől a versenyre megérkezve kaptam egy szervot, mivel a sajátom az 'utolsó' tesztek alatt megadta magát.